近日,邓龙江院士团队张林博研究员联合医学院贾若男副教授,聚焦医工交叉领域,在多模态传感-视觉融合应用材料领域取得重要进展。团队提出了一种借助盐析诱导离子凝胶微相分离的策略,合成了一种同步增强力学性能、室温磷光寿命与离子电导率的离子凝胶,为具身智能机器人的发展提供技术栈基石。研究成果以“A Stretchable Full-Color Phosphorescent PVA-based Ionogels for Multimodal Sensing-Visual Integration Applications”为题在Advanced Science上发表。电子学院张林博研究员、医学院贾若男副教授为论文通讯作者,电子科技大学为论文第一完成单位。
该研究形成了富含离子液体(IL)的相(软相),该相有利于实现拉伸及离子传导功能;同时还形成了富含聚合物的相(硬相),此相能够实现能量耗散并触发聚集态磷光。所制得的离子凝胶展现出高拉伸性能(400%)、良好的韧性(约 20 MJ/m³)、较高的离子电导率(8.4 mS/cm)以及超长的余辉寿命(112.4 ms)。
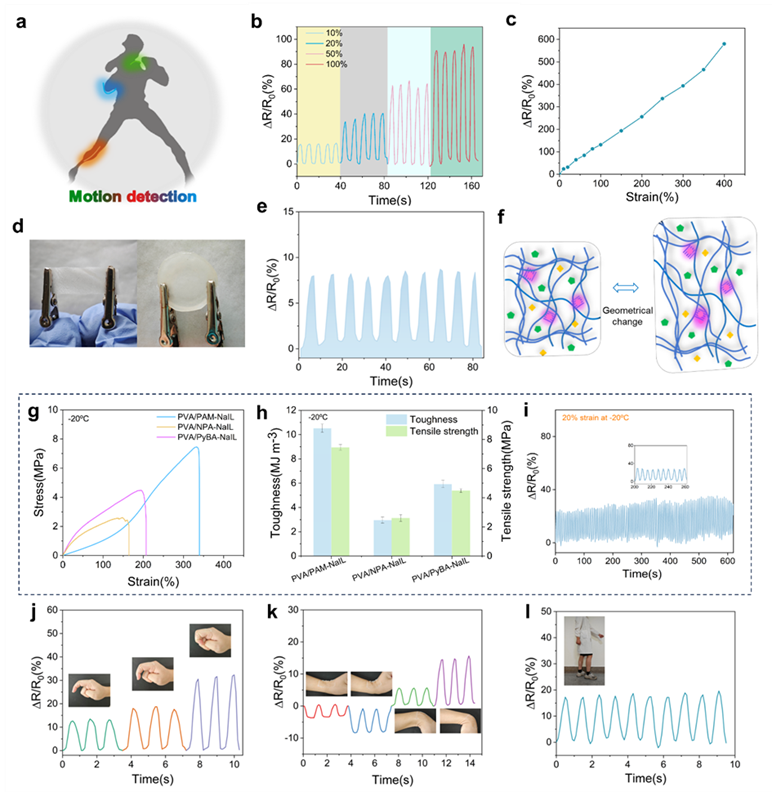
图1. a)PVA/PAM-NaIL离子凝胶内的离子成分使其具有优异的导电性和监测身体运动的能力;b)分别在10%、20%、50%和100%应变下重复加载-卸载过程中的电阻相对变化;c)电阻随应变变化情况;d)用于电性能评估的PVA/PAM-NaIL离子凝胶在承受拉伸应力(左)和压缩应力(右)时的照片;e)连续压缩下的电阻相对变化;f)外部刺激对离子凝胶离子电导率影响机制;g)离子凝胶在-20°C时的应力-应变曲线;h)-20°C时计算得到的韧性;i)在-20°C下20%压缩应变时循环加载和卸载期间的相对电阻变化;j)手指运动、k)手腕弯曲和 l)行走过程中的运动特征的实时监测。
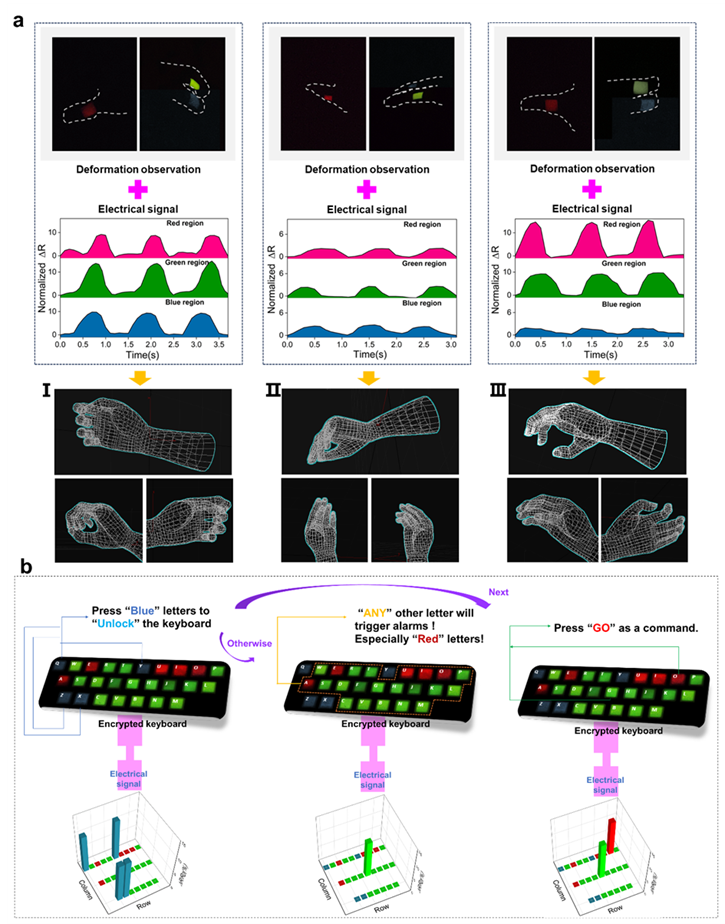
图2. a)通过一种协同双模预测策略高精度模拟机器人手抓取状态,该策略将对不同磷光颜色区域变形的视觉观察与抓取动作期间相应的电信号波动相结合;b)在关闭紫外灯后,多色余辉显示对键盘进行编码,结合打字时电信号变化,构建了一个高度安全的信息加密和传输系统。
该成果制备的亲肤电子传感器,有望应用于人工智能、假肢、人机交互、虚拟现实和健康监测等领域,为下一代具身智能提供研究基础。相关研究工作得到了国家自然科学基金群体项目的资助。
文章来源:电子科技大学