

【嘉勤点评】图森未来发明的应用在大型卡车车队上的车辆数据处理以及避障、领航方案,借助于每一辆跟随车上的车载服务器,可以获取到车上的定位信息和运动学参数,从而实现每辆车的定位。这样,每辆跟随车虽然前向视野受到遮挡,也可以实现准确定位。
集微网消息,基于自动驾驶技术的卡车可以组成一个车队,按照一辆车接一辆车的形式行驶。一个车队中,带头行驶的车辆可以记为领航车,其它车辆可以记为跟随车。在跟随车跟随领航车的过程中,需要获得车队中每辆车的定位信息,该过程需要依靠定位传感器以及车载地图来实现。
基于车辆上安装的定位传感器,如摄像头、激光雷达、毫米波雷达等,来采集该车辆周围环境信息。基于采集到的该车辆周围环境信息与预先加载的车载地图进行匹配,根据匹配结果获得该车辆的定位信息。
但是,由于车队中车距较近(一般会小于10米),除了车队中的领航车上安装的定位传感器可以获得足够的前向视野,采集到足够的周围环境信息,以实现对领航车的准确定位之外。车队中的跟随车上安装的定位传感器由于前向视野会受到前车的遮挡,形成视野盲区,无法采集到足够的周围环境信息,也就无法实现对跟随车的准确定位。
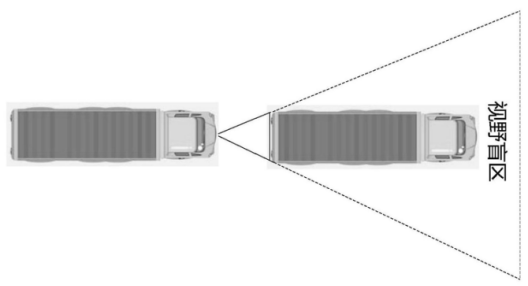
跟随车上安装的定位传感器需要的前向视野可以理解为如上图中所示的实线部分和虚线部分构成的大三角区域,跟随车视野盲区可以理解为上图中前向视野中除实线部分构成的小三角区域之外的区域。
在这种情况下,为了实现对跟随车的准确定位,可以将车队中的车距加大。例如,增大到100米以确保跟随车上安装的定位传感器也可以获得足够的前向视野,采集到足够的周围环境信息,以实现对跟随车的准确定位。但是加大车队中车距的方式,车队容易被其它车辆插入,会给车队行驶带来安全隐患。
因此,为了保持自动驾驶卡车的良好行驶秩序以及实现跟随效果,图森未来在2020年6月5日申请了一项名为“一种车辆数据处理方法、装置、介质和设备”的发明专利(申请号:202010503874.4),申请人为北京图森未来科技有限公司。
根据该专利目前公开的相关资料,让我们一起来看看这项技术方案吧。

如上图,为该专利中发明的车辆数据处理方法的流程示意图,首先,由第一车载服务器接收信息,该信息为在车辆的前一车辆上的第二车载服务器发送的定位信息和指定的运动学参数的参数值信息。如果第二车载服务器所在车辆为车队中的领航车,则第二车载服务器发送的定位信息为第二车载服务器根据所在车辆上的定位传感器采集到的车辆周围环境信息,与预先加载的车载地图进行匹配得到的所在车辆对应的定位信息。
而如果第二车载服务器所在车辆为车队中的跟随车,则第二车载服务器发送的定位信息为第二车载服务器接收所在车辆的前一车辆上的第三车载服务器发送的定位信息和指定的运动学参数的参数值信息。根据确定出的所在车辆与所在车辆的前一车辆之间的指定的相对位姿参数的参数值信息,以及接收到的定位信息和指定的运动学参数的参数值信息,确定出的所在车辆对应的定位信息。
其次,根据相应信息,第一车载服务器实现车辆定位。也就是说,第一车载服务器可以根据确定出的所在车辆与所在车辆的前一车辆之间的指定的相对位姿参数的参数值信息,以及接收到的定位信息和指定的运动学参数的参数值信息,确定所在车辆对应的定位信息。
此外,车队中的跟随车除了可以基于领航车采集的周围环境信息进行车辆定位,还可以基于领航车采集的周围环境信息进行周边障碍物的识别,以进一步克服视野盲区的存在所产生的无法准确地获取周边障碍物的信息的问题。
需要说明的是,上述提到的运动学参数包括有航向角、牵引车与挂车之间的夹角、全球定位系统安装点到挂车转轴的距离以及挂车转轴到挂车尾部的距离。指定的相对位姿参数包括所在车辆牵引车与前一车辆挂车之间的夹角,以及所在车辆全球定位系统安装点到前一车辆挂车尾部的距离。
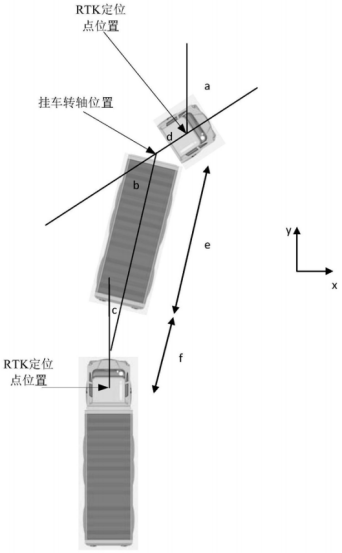
如上图,为该专利中展示的第一运动学参数和第二运动学参数示意图,假设航向角的参数值用a表示、牵引车与挂车之间的夹角的参数值用b表示、全球定位系统安装点(可以简单记为RTK定位点)到挂车转轴的距离的参数值用d表示。挂车转轴到挂车尾部的距离的参数值用e表示、所在车辆牵引车与前一车辆挂车之间的夹角的参数值用c表示。所在车辆全球定位系统安装点到前一车辆挂车尾部的距离的参数值用f表示。

最后,如上图,为这种车辆数据处理装置的结构示意图,接收模块11用于接收第一车载服务器所在车辆的前一车辆上的第二车载服务器发送的定位信息和指定的运动学参数的参数值信息。
定位模块12用于根据接收到的所述定位信息和指定的运动学参数的参数值信息,确定第一车载服务器所在车辆对应的第一定位信息。障碍物识别模块13用于根据接收到指定的运动学参数的参数值信息和障碍物坐标信息,确定第一车载服务器所在车辆对应的障碍物坐标信息。
以上就是图森未来发明的应用在大型卡车车队上的车辆数据处理以及避障、领航方案,借助于每一辆跟随车上的车载服务器,可以获取到车上的定位信息和运动学参数,从而实现每辆车的定位。这样,由于领航车可以实现准确定位,每辆跟随车虽然前向视野受到遮挡,存在视野盲区,也可以实现准确定位。
关于嘉勤

深圳市嘉勤知识产权代理有限公司由曾在华为等世界500强企业工作多年的知识产权专家、律师、专利代理人组成,熟悉中欧美知识产权法律理论和实务,在全球知识产权申请、布局、诉讼、许可谈判、交易、运营、标准专利协同创造、专利池建设、展会知识产权、跨境电商知识产权、知识产权海关保护等方面拥有丰富的经验。
(校对/holly)


