1.北京大学在IEEE ISPSD发表2项宽禁带半导体功率器件重要技术进展;
2.北京大学团队运用多尺度拓扑和AI提升“物质多体相互作用”能量预测精度;
3.复旦团队研发的多源仿生3D打印柔性灵巧手在WAIC上首次亮相;
4.中国科大提出基于裂纹磁阻调制的柔性电感式传感新机理;
1.北京大学在IEEE ISPSD发表2项宽禁带半导体功率器件重要技术进展;
近日,功率半导体器件领域的顶级会议IEEE International Symposium on Power Semiconductor Devices and ICs (ISPSD) 在日本熊本市举行。北京大学集成电路学院两篇高水平论文入选,向国际功率器件与功率集成电路领域的同行展示了北京大学最新的研究成果。这两篇论文内容涉及GaN CMOS集成技术、SiC MOSFET可靠性物理研究。论文详情如下:
1 高性能GaN CMOS集成技术
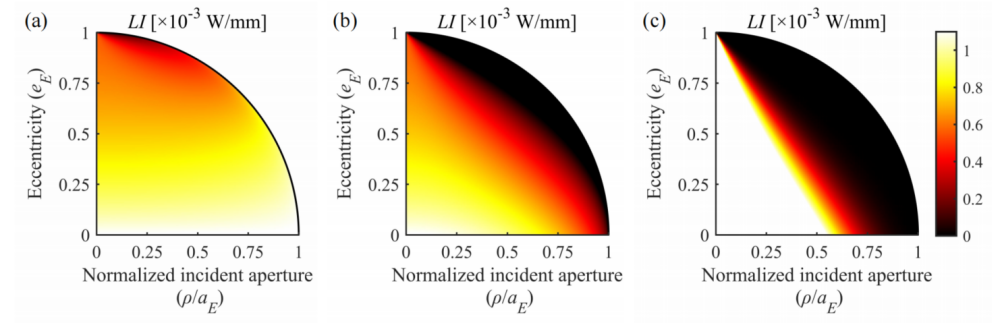
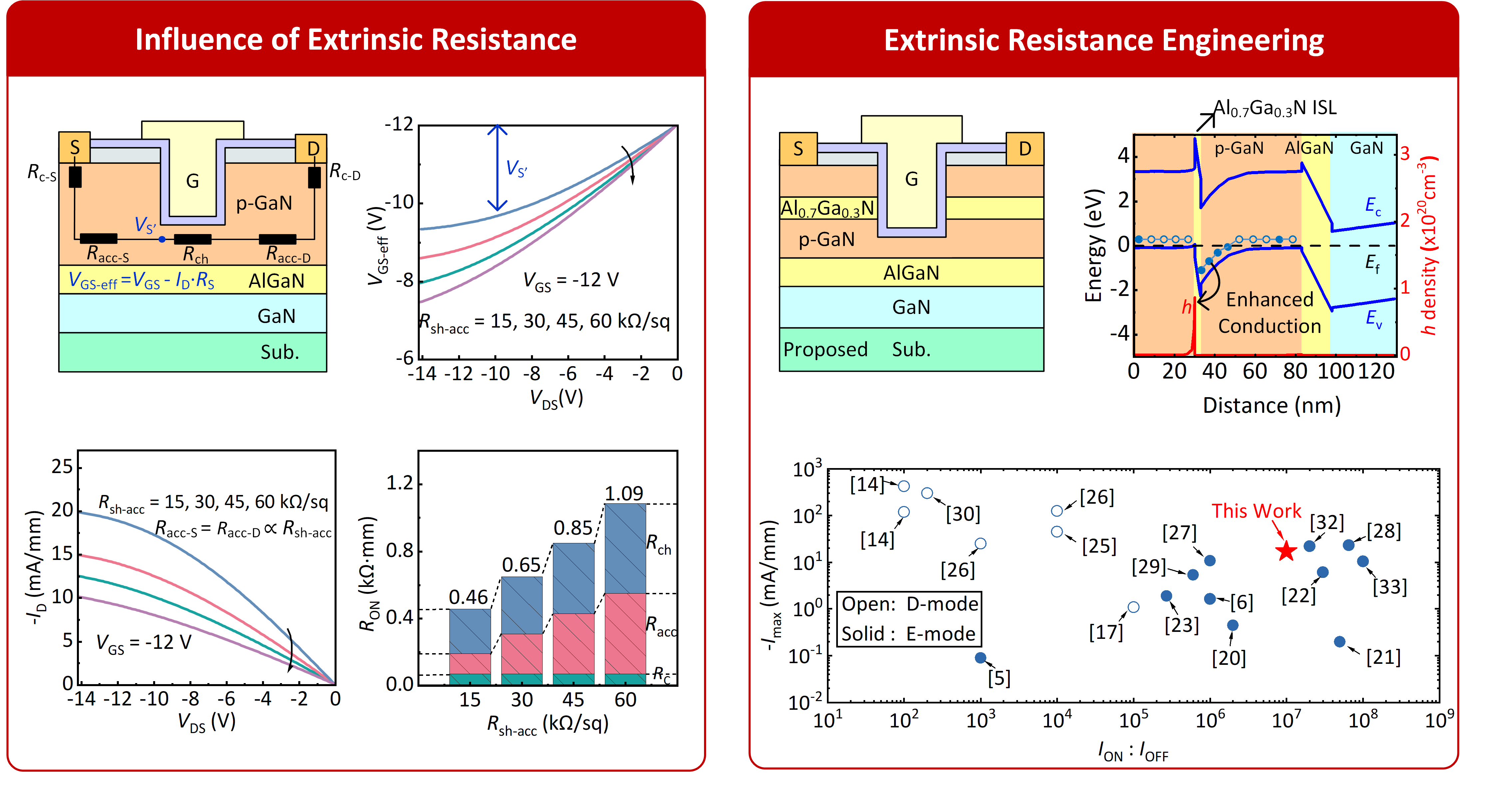
GaN CMOS逻辑电路是提升GaN功率芯片高频特性的重要技术环节。然而,当前GaN p沟道场效应管 (p-FET) 的低电流密度问题限制了该技术的发展。针对这一问题,当前多数研究聚焦于器件沟道区域的优化,然而,p-FET低电流密度问题仍未得到有效解决。
北京大学魏进团队研究发现源极电阻对电流密度具有重要的影响。首先,研究团队通过TCAD仿真发现源极电阻降低器件沟道处的有效栅压,从而降低器件电流密度和增大器件的沟道电阻。为优化器件源极电阻从而提升电学性能,该团队通过在器件接入区域插入一层Al0.7Ga0.3N,利用电离增强的方案有效降低器件的源极电阻。器件测试结果验证了通过源极电阻工程可有效提升GaN p-FET电流密度,测试数据处于国际先进水平。相关成果以Engineering Extrinsic Resistance of E-Mode GaN p-FET towards Enhanced Current Density为题,发表于2025年国际功率半导体器件与集成电路研讨会 (ISPSD), 文章第一作者是北京大学集成电路学院博士研究生段嘉霖,通讯作者是魏进研究员。
2 一种SiC MOSFET阈值电压负漂移新机制研究
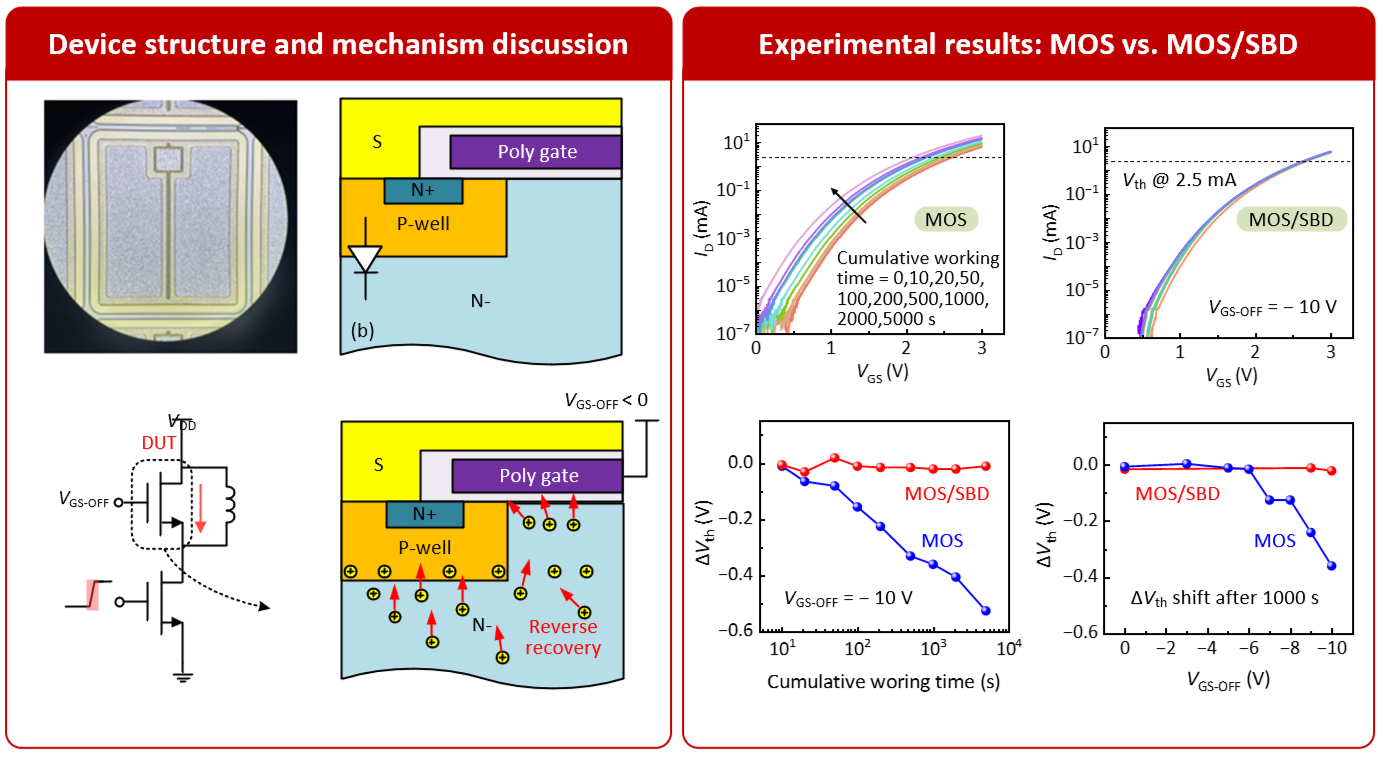
目前,SiC功率器件已在商业领域取得重大成功,但受限于当前的氧化工艺导致的较高界面陷阱,以及SiC/SiO₂界面较小的带隙差,使得阈值电压Vth不稳定性成为SiC MOSFET的一个突出难题。在同步整流等实际应用场景中,续流二极管是必不可少的元件。一方面,相比反并联肖特基势垒二极管 (SBD),SiC MOSFET内置的体二极管凭借其更高的成本效益展现出显著优势。另一方面,为了抑制SiC MOSFET误开启现象,常使用负的栅极电压将器件关断。北京大学魏进研究员团队通过深入研究首次发现,在体二极管导通状态下施加负的栅极电压关断器件时,会引发显著的阈值电压负漂移现象。
针对这一重要发现,研究团队创新性地提出了一种全新的物理机制:当体二极管导通时,p-well区会向JFET区注入大量空穴;在反向恢复过程中,这些空穴在漏极电场作用下加速流向源极,其中部分空穴被加在栅极上的负压吸引,通过轰击栅氧,在栅氧化层中积累固定的净正电荷,导致阈值电压漂移。该物理机制首次系统揭示了负栅偏压诱导的阈值电压不稳定性与体二极管导通的关联性。该研究以Negative Gate Bias Induced Vth Instability in SiC MOSFET: Role of Body Diode Conduction为题,发表于2025年国际功率半导体器件与集成电路研讨会ISPSD。文章的共同第一作者为北京大学/北京工业大学联合培养硕士生王珮瑄和北京大学博士生劳云鸿,通讯作者为魏进研究员。
在材料科学领域,准确理解多原子系统的行为是一项基础而又充满挑战的任务。以在锂离子等高能量密度电池中发挥关键作用的锂元素为例,精确预测锂原子簇内部的能量和相互作用,对于推动下一代储能技术至关重要。然而,随着原子数量的增加,系统交互的复杂性呈指数级增长。虽然深度学习模型潜力巨大,但在材料科学领域,高质量数据的稀缺性和模型的“黑箱”特性限制了其应用。
2.北京大学团队运用多尺度拓扑和AI提升“物质多体相互作用”能量预测精度;
北京大学深圳研究生院新材料学院潘锋教授团队长期致力于图论结构化学方法的拓展与应用,作为一种将材料微观结构映射为数学图论和拓扑模型的方法,图论结构化学近年来在材料基因组、催化活性探索等方向中表现出强大的表示和预测能力,并在该领域提出了一系列创新性工作,实现了材料结构表示(J. Phys. Chem. Lett., 2023, 14: 954)、材料的反向设计(npj Comput. Mater., 2025, 11: 147)、新型固态电解质的设计(J. Am. Chem. Soc. 2024, 146, 18535;2025, DOI: 10.1021/jacs.5c04828 )、化学反应路径搜索(CCS Chemistry 2024, 7, 1)、催化活性相搜索(Nat Comm. 2025,16, 2542)。近日,潘锋团队与密歇根州立大学魏国卫(Guo-Wei Wei)教授团队合作,提出了一种名为“多尺度拓扑学习(Multiscale Topological Learning, MTL)”的可解释性框架,旨在提高多原子体系能量预测的准确性。该研究利用一种名为“持续拓扑拉普拉斯(Persistent Topological Laplacians, PTLs)”的多尺度拓扑方法,有效捕捉多体相互作用的内在属性。相关研究成果以“Enhancing Energy Predictions in Multi-Atom Systems with Multiscale Topological Learning”为题,发表于国际材料与化学的知名学术期刊《材料化学杂志A》( Journal of Materials Chemistry A)(2025,DOI: 10.1039/d5ta02687c)。
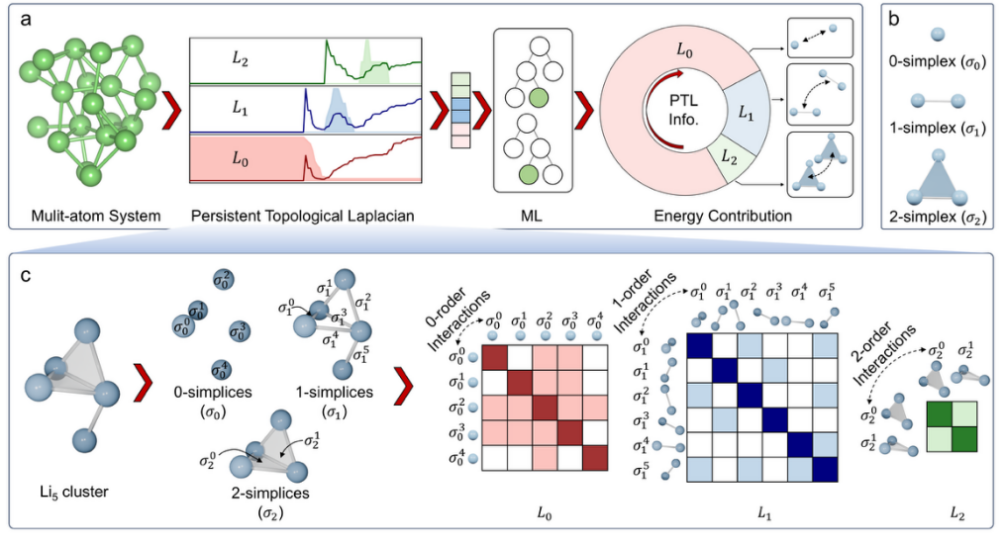
基于持久拓扑拉普拉斯的机器学习方法的总体框架
该研究的核心思想是将复杂的原子结构映射为拓扑空间中的单纯复形(simplicial complex),并运用PTL方法在多个尺度上进行分析,从而为原子结构生成能够表征其多体相互作用的“拓扑指纹”。其创新工作流程如下(图1):首先,将一个多原子系统(如锂原子簇)视为一个单纯复形,其中0维单形代表原子,1维单形代表原子间的连接,2维单形代表由三个原子组成的环状结构。接着,通过一个名为“过滤(filtration)”的参数(原子间距d)从小到大变化,该框架可以捕捉不同尺度下的结构。在每个尺度下,PTL方法会计算出0维、1维和2维的拓扑拉普拉斯算子(L0,L1,L2),这些算子的谱信息构成了对系统拓扑和几何特性的多维度描述。这种方法的新颖之处在于,它超越了传统的基于原子坐标的描述符,能够系统性地编码原子间“多体相互作用”的复杂信息,为理解和预测材料性质提供了全新的物理视角。
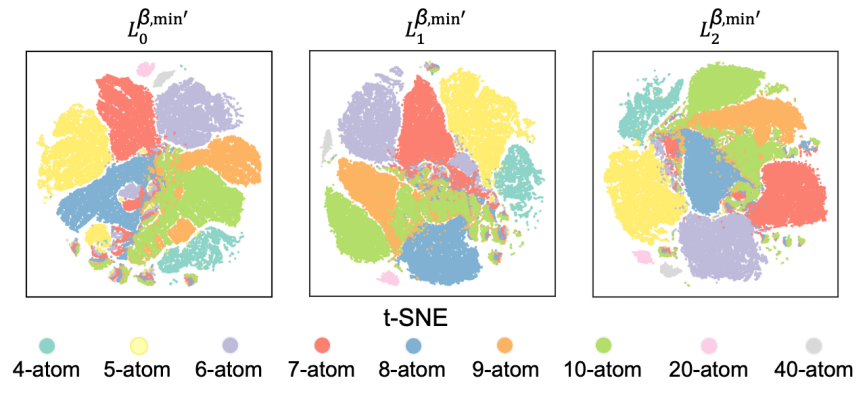
图1. 利用不同维度的拓扑信息对不同团簇体系分类的定性分析
研究团队利用一个包含136,287个锂原子簇(涵盖4原子到40原子等多种体系)的大型数据。研究的主要结论是,引入更高维度的拓扑信息能持续提升能量预测的精度。具体而言,在预测任务中,随着1维(β1)和2维(β2)拓扑特征的加入,模型的平均绝对误差(MAE)显著降低。对于所有原子体系,包含0、1、2维信息的特征集(β012)均比只含0维信息(β0)或0、1维信息(β01)的特征集表现更优。
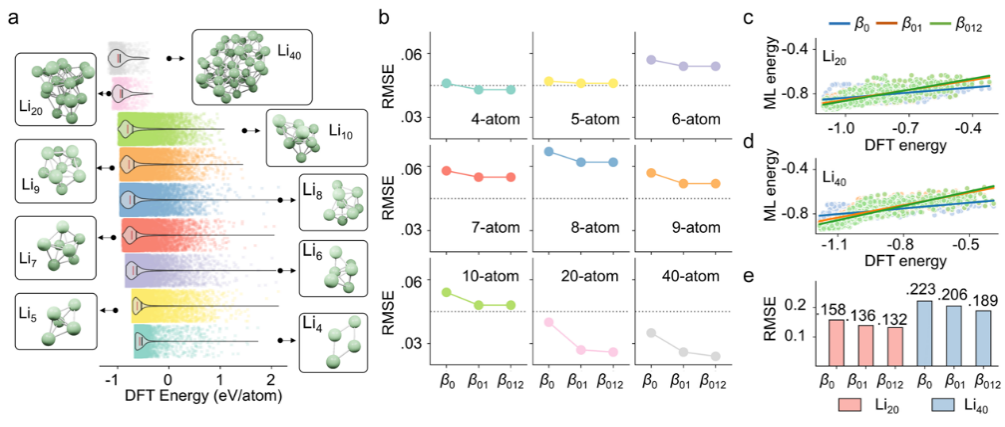
图2. 拓扑学习方法在不同维度的拓扑信息对能量预测精度的影响的定量分析
然而,尽管高维信息至关重要,但其对预测精度的贡献度随维度增加而逐渐减小。0维特征贡献最大,其次是1维特征。这一趋势与多体物理学理论高度一致,即高阶相互作用通常被视为对系统的微扰修正,从而验证了该拓扑方法的物理可解释性。此外,该框架还展现出强大的泛化与排序能。当研究人员使用小尺寸原子簇(Li4-Li10)训练模型后,该模型能有效预测从未见过的、结构更复杂的大尺寸原子簇(Li20-Li40)。结果显示,引入高维信息后,模型对Li20和Li40能量排序的准确性(通过皮尔逊相关系数PCC衡量)得到了大幅提升,这对从庞大的结构空间中筛选出最稳定的构型具有重要意义。
这项研究表明,基于拓扑学的机器学习框架不仅能精确预测多原子体系的能量,还能提供符合物理直觉的深刻见解。该方法有望被推广至更广泛的领域,如催化剂设计、新材料发现以及药物分子设计,为解决复杂体系中的科学难题开辟了新的道路。
潘锋与魏国卫为本文的通讯作者。深研院新材料学院博士毕业生陈冬为本文第一作者(现在在密歇根州立大学任助理研究员)。本研究由国家自然科学基金、广东省重点实验室等项目资助。
3.复旦团队研发的多源仿生3D打印柔性灵巧手在WAIC上首次亮相;
小指如章鱼般柔软蜿蜒,指尖还自带“透视眼”。整只“手”遇热能变色提醒,单根“手指”成本不到1块钱。在2025世界人工智能大会(WAIC)上,复旦大学智能机器人与先进制造创新学院智能机器人研究院甘中学教授团队自主研发的多源仿生3D打印柔性灵巧手首次亮相。

这款灵巧手打破传统机器手设计,以仿生结构、3D打印柔性材料和传感控制系统相结合,不仅能灵活抓握、夹取、勾挑,还能通过温度变色、视觉识别等功能巧妙应对复杂环境,更大幅降低制作成本,诠释机器人与人类共融共生的美好未来。
小拇指像章鱼触手,东西掉在缝隙也能拿
灵巧手是一种能够模拟人手复杂动作和精细操作的机器人末端执行器,广泛应用于服务机器人、医疗、工业装配和辅助残障等领域。展望未来,当人形机器人进入家庭,灵巧手也将承担绝大多数操作任务,是核心部件之一。
这款由复旦大学团队所开发的多源仿生灵巧手可通过3D打印定制化设计并一次成型,其中拇指到无名指为仿人手结构,采用柔性关节与绳索欠驱实现轻质、柔软、而灵巧的操作能力,小指为仿章鱼触手结构,能像章鱼一样实现对多种物体的灵巧、连续弯曲包络,同时其指尖嵌入了微型内窥镜,为这只“手”点亮一盏灯,让它在黑暗狭窄的缝隙中也能“看清”目标,实现精准抓取。比如钥匙不慎滑落橱柜窄缝,人手或刚性机械手望尘莫及,正是这只灵巧手大展身手的舞台。即使潜入水下环境,它也能保持出色的成像能力。

相较于传统六自由度灵巧手,这款产品还能实现单手握持三个物体的操作,其自由度远超传统刚性机械手、甚至人手:不仅手指可灵活左右摆动,大拇指更能完成 180 度旋转,绕至手背侧与 章鱼手 结构形成协同动作。

而在需要稳定性的任务中,它同样出色。例如打开抽屉时,机械臂主体无需大幅前后移动,仅凭灵巧手的协调动作即可完成,保持整体姿态平稳。食指与中指由单电机驱动,配合默契,可实现耦合的双向侧摆与抓取动作,无论是需要细腻操作的精密物件还是需要稳固握持的重物,都能轻松应对。

整只灵巧手的手指与外壳采用防水的变温柔性材料,通过3D打印技术一体成型。这不仅赋予了它类生物组织的柔软与弹性,更让它拥有遇热变色的“超能力”,及时提醒用户“热手”与“冷手”的风险,提升了家庭、医疗等场合的人机安全保障体验。
可适配多种人型机器人,单根手指控制在1元以内

在传统机器人领域,实现高自由度动作、多任务操作,通常需要配备大量驱动电机和复杂的机械结构,导致成本高昂、装配难度大、维护繁琐。而复旦研发的灵巧手仅配置6个电机,且所有电机都集成在手部而没有涉及机械臂,这意味着灵巧手的产业化门槛大幅降低。
从成本来看,这款灵巧手采用 3D 打印与模块化设计,单根手指本控制在 1 元以内,整只手成本在千元级,大幅降低更换难度和成本,用户在家也可完成自主更换。得益于其标准化设计和高度集成,灵巧手可灵活适配多类型人形机器人、机械臂,可以帮助人形机器人实现“按需搭配”、智能升级。

在家政辅助、医疗康复、实验室辅助、特殊环境任务等多个领域,这款灵巧手拥有广阔应用前景。特别是居家服务场景下,柔性灵巧手可轻松“拿捏”杯子、钥匙、餐具等易碎且形状多变的物品,高安全性和自适应能力让老人、孩子也能安心受益于智能机器人带来的便利;在实验、医疗领域,灵巧手能协助完成精细操作或危险环境任务,可以拿取试管、调配试剂等,提升效率与安全。
该项目得益于智能机器人研究院博士后卢秋洁在灵巧操作、柔性仿生与智能感知领域长期的理论与技术积累,与甘中学教授、张壮青年研究员、以及中科大、西湖大学等团队通力协作,研究成员还包括多位研究生与本科生。项目短短三个月内从构想到样机落地,实现了材料、结构、控制三位一体的突破。
“这只是开始。希望灵巧手不仅服务于实验室,还能真正落地到千家万户,被产业和社会真正需要。”研究院人型项目总工程师刘力政博士表示,未来团队将持续优化传感与算法系统,进一步提高灵巧手在动态环境下的精细操作能力,探索更多智能感知与人机协作的新可能。
4.中国科大提出基于裂纹磁阻调制的柔性电感式传感新机理;
中国科学技术大学工程科学学院、人形机器人研究院王洪波研究员课题组联合韩国浦项科技大学材料科学与工程系Unyong Jeong教授团队和中国科学技术大学张世武教授、冯志华教授,提出了一种基于磁性薄膜贯穿裂纹的新一代电感式双向曲率柔性传感器,其能够检测0.01°的微小弯曲变形,并在汽车多次碾压和破损等情况下保持性能不变,为真实世界中的机器人精准感知开辟了新路径。成果以“Magnetic crack-based piezoinductive mechanical sensors: way to extreme robustness and ultra-sensitivity”为题发表在国际期刊《自然·通讯》(Nature Communications)上。
面向机器人在复杂场景作业的触觉感知需求,柔性传感器需要满足高灵敏度、宽检测范围、高速响应,并同时具备良好的机械耐久性、长期稳定性(无疲劳或性能退化)以及制造一致性。近年来,柔性传感器领域的研究发展非常迅速,但研制同时满足上述要求的柔性传感器仍然是一大挑战。
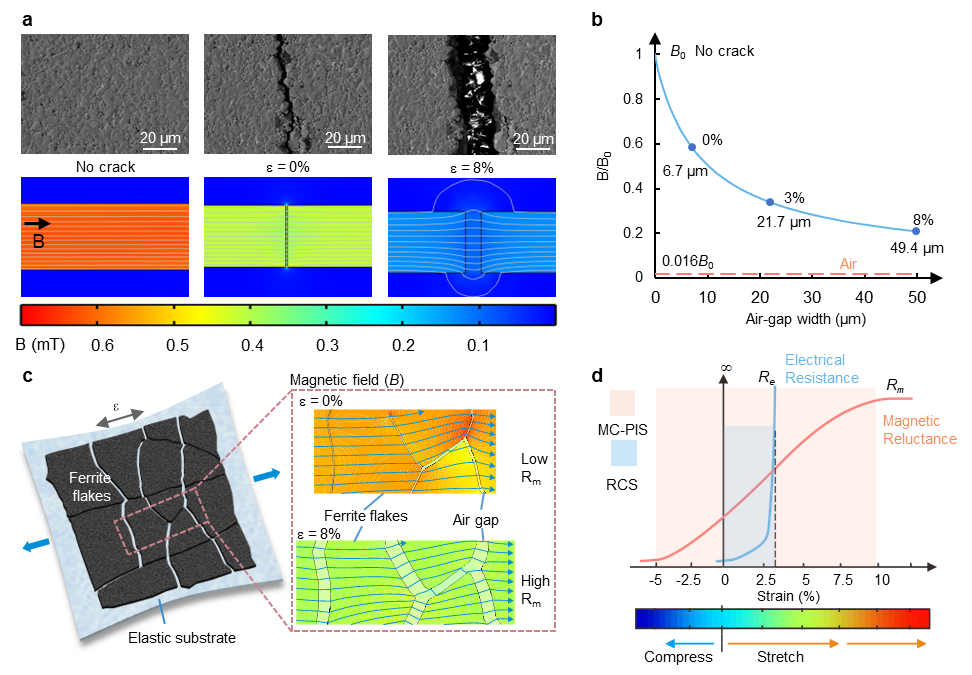
图1.磁裂纹电感传感器(MC-PIS)的工作机理及其独特性
基于“磁场可以穿过空气间隙”这一物理基础,研究团队创造性地提出一种基于贯穿裂纹磁阻调制的新兴敏感机理,实现磁性裂纹电感传感器(MC-PIS)的机器人感知新路径(图1)。将商用铁氧体薄膜卷绕在圆柱棒上即可形成随机分布的贯穿裂纹。该磁性裂纹薄膜的磁阻随着裂纹间隙而变化,当薄膜受压应力时磁阻减小,受拉应力时磁阻增大。通过将一个柔性平面线圈贴在裂纹铁氧体薄膜的下方即可检测其在变形下的微小磁阻变化,实现双向弯曲传感。该电感式柔性双向弯曲传感器可在-200°至327°的范围内检测低至0.01°的微小弯曲变形,并具有响应速度快、无迟滞、长期稳定性高,制造一致性好等特性。
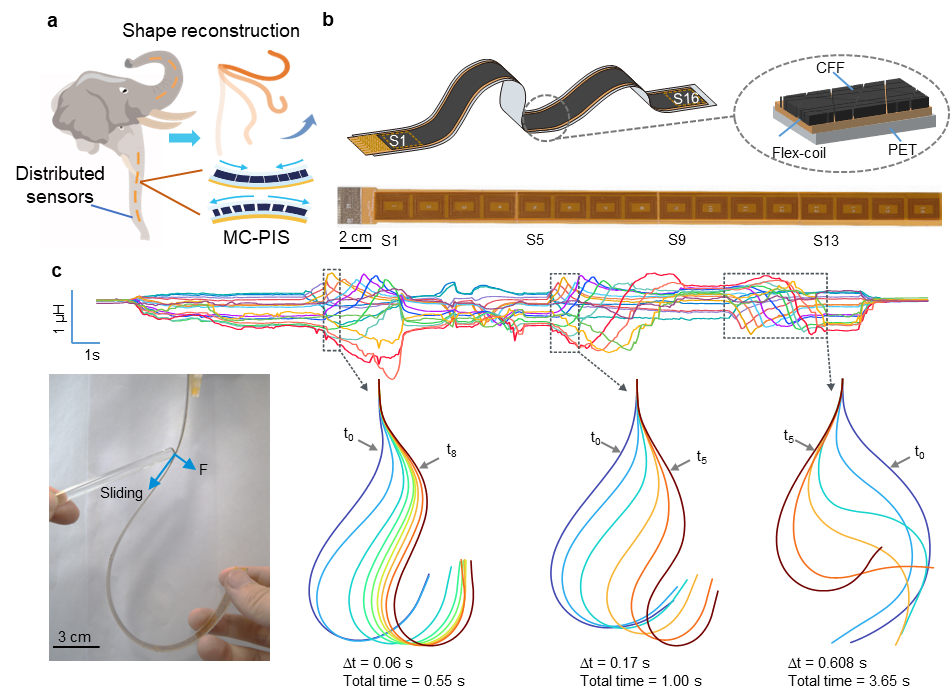
图2.基于MC-PIS的柔性带实时形状监测
为了验证该传感器在真实世界场景下准确感知微小变形的能力,研究团队设计了基于16个MC-PIS单元的自感知柔性带(图2)。无需任何数据收集训练或者复杂算法,基于简单的分段等曲率模型,该柔性带的形状可由MC-PIS传感器数据实时准确重建出来。该实验展现了其在软体连续体机器人或医疗导管的形状感知等领域的应用潜力。
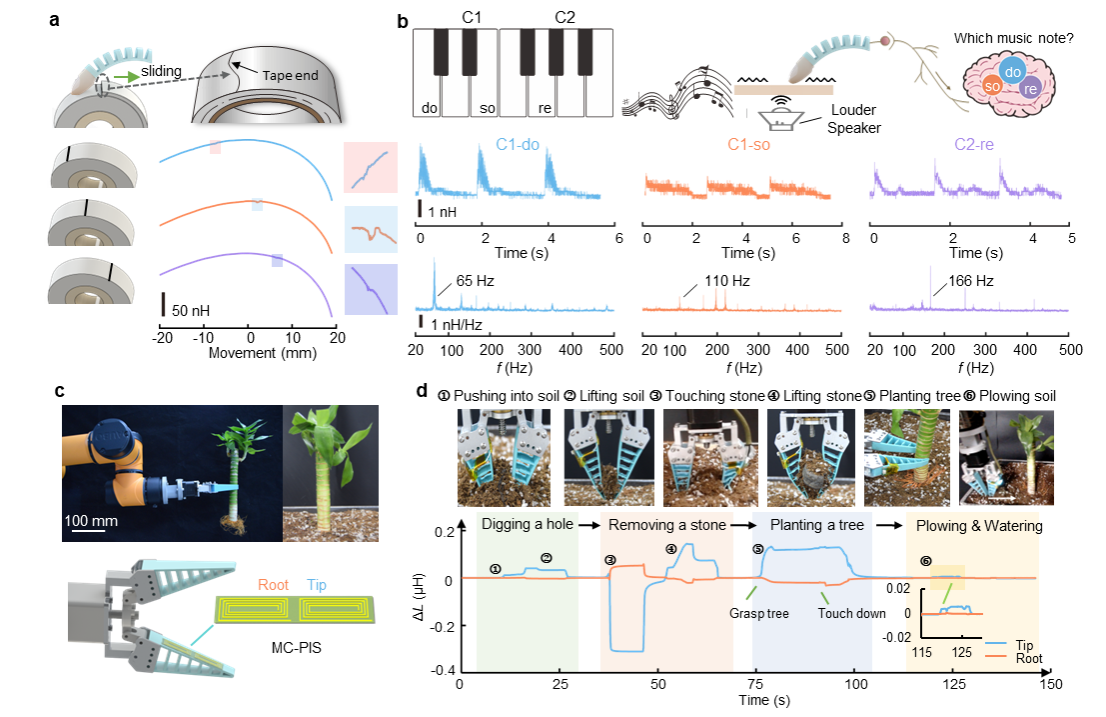
图3.MC-PIS在软体机器人方面的应用
由于MC-PIS具有极高的分辨率和稳定性,集成该传感器的仿生柔性手指能够实现非常细腻的触觉感知。该仿生手指滑过透明胶带的表面时可感知胶带的形状并识别“端头”的位置,与桌面接触时能够检测音乐引起的微小振动并准确区分不同的音调(图3)。此外,MC-PIS还可为柔性夹爪提供多模态触觉感知,赋能机器人自主植树的多个作业任务。在整个机器人植树过程中,两个MC-PIS传感器为各操作任务提供了实时的触觉信号。即使在反复接触并摩擦土壤和石块后,传感器始终未出现输出漂移或性能退化,表现出优异的稳定性与可靠性。(图3c)
工程科学学院精密机械与精密仪器系博士生彭玉连、王正岩,特任副研究员吴后平为论文第一作者。工程科学学院、人形机器人研究院王洪波研究员,韩国浦项科技大学Unyong Jeong教授为论文通讯作者。论文的合作者还包括中国科学技术大学工程科学学院张世武教授,冯志华教授等。该项研究工作得到了国家自然科学基金项目、中国科学院引才计划青年项目和中国科学技术大学高层次人才引进计划的支持。